具备安全性的无人机控制器是保障无人机作战完整性的重要因素之一,该控制器能够在安全的界限范围内控制无人机的飞行性能。针对无人机的安全控制器的设计问题,首先,对无人机的闭环控制系统进行分析,并采用非参数预测误差估计的方法对闭环控制系统中的执行机构模块进行辨识,以证明辨识得到的模型与实际模型无偏;其次,阐明了无人机安全性的含义,并在闭环控制系统的辨识模型的基础上,对无人机的安全控制器进行了设计;最后,以无人机飞行姿态角中的俯仰通道为例,对安全控制器性能进行了仿真验证。实验结果证明了无人机安全控制器的有效性,能够将无人机的飞行性能控制在安全范围内,为飞行安全提供保障。
关键词:无人机;闭环控制系统;安全性;控制器;预测误差估计
论文《基于预测误差法的无人机安全控制器设计》发表在《电光与控制》,版权归《电光与控制》所有。本文来自网络平台,仅供参考。
0 引言
21世纪以来,无人技术蓬勃发展,在军用和民用领域都有着广阔的应用前景。在军用领域中,无人机被大量投入战场,替代人类执行多种枯燥、肮脏、危险的任务,在快速目标侦察、虚实融合、信息迅速传递和摧毁目标等关键环节具有显著优势;在民用领域中,无人机凭借其轻便、易操作等优势承担航拍、测绘、农业植保、物流等多项工作。因此,无人机的相关研究成为了热门领域。
无人机作战完整性是指无人机在作战的过程中结构保持完好,其耐久性、保障性、安全性、修复性等性能不退化的固有属性。现有的关于无人机作战完整性的研究主要集中于无人机的结构设计与工艺制造、故障预测与健康管理(PHM)等方面。例如,何宇廷等从耐久性、保障性、安全性、生存性、修复性和结构能力6个方面的特性探讨了无人机作战完整性对无人机结构强度的需求;景博等则针对军用无人机基于三维多相设计准则对PHM系统进行了一体化的设计,设计的架构降低了计算功耗,提升飞行器的故障预测和健康管理能力。
但是,在飞行过程中,无人机的飞行控制系统对于无人机作战完整性也是至关重要的存在,它控制着空域中飞行器的飞行速度、姿态等性能,是保障无人机稳定飞行的重要装备。学者们针对无人机控制器的设计展开了大量的研究,也取得了瞩目的成果。例如,郭大力等提出了基于极值搜索的鲁棒控制方法,设计了四旋翼无人机的姿态跟踪控制器;张云峰等针对闭环变量带误差系统模型进行分析,采用最小方差控制法设计了控制器;WANG等针对无人机的级联系统进行分析并进行了控制器设计。以上设计的控制器可以在相应的任务环境下保障无人机的相应性能。但是,现有的研究针对无人机安全性方面还存在空白,在飞行过程中,无人机若飞行速度过快或过慢、飞行姿态超过一定限度就会影响到飞行状态,甚至出现坠机的可能,不利于其安全性与完整性。因此,面向安全性的无人机控制器的设计对保障无人机作战完整性具有非常重要的影响。
针对无人机飞行的安全性问题,本文首先采用非参数辨识的方法对无人机闭环控制系统的被控对象进行辨识,在此基础上,对无人机的安全性进行阐述,设计了面向安全性的闭环控制系统控制器,并进行了仿真验证。
1 无人机系统未知模块辨识
1.1 无人机系统
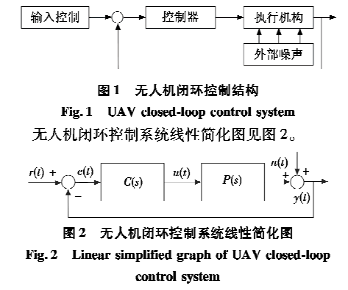
一架无人机是由输入控制量 (U=(delta_{t}, delta_{a}, delta_{r}, delta_{T})^{T}) 控制,通过机载测量系统可以记录输出响应 ((x_{g}, y_{g}, z_{g}, u, v, w, heta, varphi, psi, p, q, r)^{T}) 的输入-输出系统。其中:((x_{g}, y_{g}, z_{g})) 是惯性坐标系下无人机的坐标;(u, v, w) 分别是前向、法向和垂向速度;( heta)、(varphi)、(psi) 分别是俯仰角、滚转角和航向角;(p)、(q)、(r) 分别是滚转角速率、俯仰角速率和航向角速率。带有反馈控制的闭环系统可以处理无人机中的输入失真,使其抑制扰动、保持稳定。无人机发送控制指令,经由控制器控制,执行机构执行相应操作并反馈控制的闭环控制结构,如图1所示。
图1 无人机闭环控制结构 Fig.1 UAV closed-loop control system
无人机闭环控制系统线性简化图见图2。
图2 无人机闭环控制系统线性简化图 Fig.2 Linear simplified graph of UAV closed-loop control system
在飞行闭环控制系统中,(P(s)) 表示执行机构,(C(s)) 表示无人机控制器,(n(t)) 为外部噪声,(r(t)) 为输入信号,(y(t)) 为闭环的输出响应,(u(t)) 为内部信号,(epsilon(t)=r(t)-y(t)) 表示误差信号。
1.2 闭环控制系统执行机构辨识
无人机控制器的设计离不开被控对象的模型,在工程研究中,因为存在噪声、扰动等因素,被控对象的模型不能通过机理建模法直接获得。因此,需要应用系统辨识的方法获得相应的模型。
根据图2所示的系统简化图,可得输出的数学表达式为
同样,可推导出内部信号的表达式为
收集该系统的输入-输出数据 ({r(t), u(t)}_{t=1}^{N}),其中,(N) 为输入-输出数据对的数量。利用输入信号 (r(t)) 与内部信号 (u(t)) 的相关性可以计算两者的期望 (E(r(t- au) u(t))),得到相关函数有
若 (R_{ur}( au)=E(r(t- au) u(t))) 成立,那么反之也成立,即 (E(r(t- au) u(t))=R_{ur}( au))。于是式(3)中有 (frac{C(s)}{1+P(s) C(s)} E(r(t- au) r(t))=frac{C(s)}{1+P(s) C(s)} R_{r}( au)),即 (E(r(t- au) r(t))=R_{r}( au)),式中 (R_{r}( au)=E(r(t- au) r(t)))。同理,可得输出响应 (y(t)) 与输入信号 (r(t)) 的相关函数为
联合式(3)、式(4)有
故执行机构的估计可表示为
从式(6)可以看出,在对输入信号、内部信号、输出响应3种数据 ({r(t), u(t), y(t)}_{t=1}^{N}) 进行测量收集之后,得到两个相关函数,执行机构的辨识模型可以通过这两个相关函数的比值确定。综上所述,无人机闭环系统中未知模块的模型可以通过数据直接驱动辨识获得,不需要获知系统内的参数值。
同理,闭环系统中的控制器 (hat{C}(s)) 也可以从两个相关函数的比值中获得,即
分析式(7)可以发现,推导过程不需要内部参数的参与,因此这是一种基于非参数估计的方法。接下来证明基于数据驱动的非参数估计获得的模型与真实值是无偏的。
对式(6)两边进行期望运算有
利用输入信号和外部噪声的不相关性,即 (E(r(t- au) n(t))=0),两者的期望值为0,式(8)可以化简为
同理,可得
分析式(9)、式(10)可以发现,通过输入-输出的数据辨识得到的执行机构的估计 (hat{P}(s)) 与其真实输出值是相等无偏的,同样,控制器的期望值 (hat{C}(s)) 也与真实值相等无偏。
2 面向安全性的无人机控制器设计
2.1 安全性
无人机控制策略的核心思想是无人机的执行机构可以有效地跟随输入指令,实现安全飞行,从而保证无人机作战的完整性。因此,面向安全性的无人机控制器设计就可以转化为执行机构对输入指令的最优跟踪问题。
在实际的飞行中,无人机需要保证闭环控制系统的输出响应 (y(t)) 会跟踪一个给定的预期信号 (M(s) r(t)),即
式中,(M(s)) 为预期传递函数。要保证无人机飞行的安全性,就需要对闭环的输出进行限制,使其飞行性能(如速度、姿态角等)在一个有限的范围或者区间内,不超过一定的界限,即
当上界 (y_{max}(t)) 和下界 (y_{min}(t)) 对应于两个常数值时,即时不变的情况下,闭环输出位于两条直线之间;然而在一般情况下,闭环输出位于两条对应于时变上界和下界的不规则曲线之间。
2.2 控制器设计
由安全性的分析可知,面向安全性的无人机控制器的设计是为了保证闭环传递函数能够跟踪一个预期或者期望的传递函数,使得闭环的输出可以在一个有限可控的范围内。面向安全性的无人机闭环控制系统如图3所示。
图3 面向安全性的无人机闭环控制系统 Fig.3 Security oriented closed-loop control system of UAV
根据图3及上文的分析可得输出误差为
故,可以将式(11)~(13)表述的安全控制设计问题转化为一个决策变量未知的安全控制器的约束优化问题。该问题可以表述为
式中,执行机构模型用1.2节中辨识得到的 (hat{P}(s)) 表示。约束优化问题中的函数 (C(s)_{safe}) 代表最优跟踪,两个不等式约束是安全性能的约束条件。
在式(14)中引入两个拉格朗日乘子
设置拉格朗日函数满足 (L(C(s)_{safe}, {lambda_{i}, mu_{i}}_{i=1}^{N})=L(C(s)_{safe}, lambda, mu)),即
应用KKT(Karush-Kuhn-Tucker)最优性条件有
求解得到
由此得到面向安全的无人机控制器为
3 仿真验证
选定H380固定翼无人机飞行控制系统中的俯仰通道开展仿真实验,俯仰角速率安全范围设定为 ([-30, 30])(单位:((°)/s)),收集控制器两侧的输入-输出数据,数据变化如图4所示。
图4 输入-输出观测信号 Fig.4 Input and output signal
在固定翼无人机的设计过程中,由于无人机的空气动力学数据一般是通过风洞吹风实验获得的,因此,无人机的空气动力学参数不可避免地存在误差,误差越小则能证明性能越好。为了测试辨识所得无人机控制器的性能,图5给出了PID控制器和辨识控制器在给定姿态信号情况下的响应对比曲线,给定的俯仰角为10°和20°。
图5 不同控制器的响应对比曲线 Fig.5 Response curves of different controllers
对比图5中的曲线可得:在给定俯仰角度较小的情况下,PID控制器控制下姿态角变化比较慢,调整时间约为4s左右,而采用辨识级联控制(文中简称辨识控制)的姿态响应较快,调整时间约为2s。在大角度的俯仰信号输入时,PID控制器的调整时间约为10s,且有约0.7°的误差,而辨识控制器的调整时间为2.8s左右,基本没有误差,可见,辨识得到的模型具备更高的效率及精度。
图6是俯仰角速率变化曲线。
图6 俯仰角速率变化曲线 Fig.6 Pitch rate variation curves
从图6的曲线可以看出,辨识控制器的俯仰角速率变化幅度高于PID控制器,回落速度也快于PID控制器。整个俯仰速率的变化是在安全范围内的,符合安全控制器的要求。
4 结论
本文从无人机作战完整性角度出发,对无人机安全控制器进行了分析与设计:
1) 对无人机的闭环控制系统进行分析与抽象,采用非参数预测误差估计方法对系统中执行机构的模型进行辨识,并验证其无偏性;
2) 对无人机飞行安全性进行了阐述,并基于辨识得到的模型,进行了安全控制器设计;
3) 以俯仰角通道为例对固定翼无人机的俯仰通道安全控制器的性能展开仿真实验,实验结果验证了控制器的优良跟踪性能,同时可以在安全范围内变化,可以保障无人机安全飞行。
参考文献
[1] LIU W, ZHANG T, HUANG S J, et al. A hybrid optimization framework for UAV reconnaissance mission planning[J]. Computers & Industrial Engineering, 2022, 173(C): 108653.
[2] YANG Z Y, YU X Y, DEDMAN S, et al. UAV remote sensing applications in marine monitoring: knowledge visualization and review[J]. Science of The Total Environment, 2022, 838 (P1). doi:10.1016/j.scitotenv.2022.155939.
[3] VAIGANDLA K K, THAIPAMULA S, KARNE R K. Investigation on unmanned aerial vehicle (UAV): an overview [J]. IRO Journal on Sustainable Wireless Systems, 2022, 4 (3): 130-148.
[4] ZHANG W Y, LUO S, WANG J, et al. Development and prospect of intelligent air-to-ground precision strike munition[C]//Journal of Physics: Conference Series. Bristol: IOP Publishing, 2023: 012169.
[5] WANG X, HE N, HONG C, et al. Improved YOLOX-X based UAV aerial photography object detection algorithm[J]. Image and Vision Computing, 2023, 135(C): 104697.
[6] SZIROCZAK D, ROHACS D, ROHACS J. Review of using small UAV based meteorological measurements for bad weather management[J]. Progress in Aerospace Sciences, 2022, 134. doi:10.1016/j.paerosci.2022.100859.
[7] SINCH P K, SHARMA A. An intelligent WSN-UAV-based IoT framework for precision agriculture application [J]. Computers & Electrical Engineering, 2022, 100(C): 107912.
[8] LI Y, LIU M, JIANG D D. Application of unmanned aerial vehicles in logistics: a literature review [J]. Sustainability, 2022, 14(21): 14473.
[9] 何宇廷. 飞行器服役(作战)完整性的提出与发展[J]. 航空工程进展, 2022, 13(3): 1-11.
[10] 何宇廷, 张腾, 马斌麟. 军用飞机结构作战完整性的基本内涵与评估[J]. 空军工程大学学报(自然科学版), 2019, 20(5): 1-7.
[11] 何宇廷, 张腾, 百勇. 基于作战完整性的军用飞机结构强度发展思考[J]. 航空工程进展, 2023, 14(5): 1-7.
[12] 景博, 黄崧琳, 王生龙, 等. 军用飞机PHM系统一体化设计架构分析[J]. 航空工程进展, 2022, 13(3): 64-73.
[13] 郭大力, 赵中原, 罗子娟. 基于极值搜索的四旋翼无人机姿态跟踪控制[J]. 智能科学与技术学报, 2023, 5(4): 486-493.
[14] 张云峰, 王建宏. 闭环变量带误差系统的控制器设计[J]. 计算技术与自动化, 2023, 42(1): 9-14.
[15] WANG J H, RAMIREZ-MENDOZA R A. Synthesis cascade estimation for aircraft system identification[ J]. Aircraft Engineering and Aerospace Technology, 2022, 95(1): 73-84.
转载请注明来自:http://www.lunwencheng.com/lunwen/dzi/22724.html
