摘要:电磁发射用直线感应电机采用基于传感器阵列的位置检测系统。该系统以电感式接近开关作为位置传感器并构成传感器阵列,通过电涡流效应感应动子运动并生成相应位置信号。利用位置算法对位置信号进行计算可以实时准确地得到动子位置。设计了位置检测系统的基本原理和拓扑结构,提出系统的参数设计方法。深入研究位置传感器的工作机理,建立传感器内部参数与输出特性的数学模型,分析了适用于电磁发射工况的传感器参数条件。进行位置传感器的性能测试,并在此基础上研制了实际的位置检测装置。通过实际发射平台验证,所设计的位置传感器和位置检测系统能够较好地实现电磁发射特殊工况下的动子位置测量并顺利完成发射任务。
关键词:电磁发射;直线感应电机;位置检测系统;电感式接近开关
0 引言
电磁发射装置是利用直线电机所产生的电磁力,按照预先设定的发射轨迹曲线,在有限冲程和较短时间内迅速将负载加速到设定速度的一种新型推进设备[1-3]。直线感应电机是电磁发射装置的核心执行机构,为适应电磁发射的特殊要求,电机采用双边长初级短次级结构[4-9],初级由若干相同的初级模块沿长度方向拼接而成,次级即为加速负载的动子。电机的控制策略采用的是带位置反馈的闭环控制[10],因此需要一套具有大量程、实时性、高分辨率和高可靠性的位置检测系统来实时、准确的反馈动子位置信息。
根据现有文献,目前实现直线电机位置检测的主要技术手段有激光干涉仪[11]、光栅式传感器[12]、磁栅式传感器[13]等。激光干涉仪的测量精度较高,但是其抗振性能和抗干扰性能较差,且成本较高;光栅式传感器对工作环境要求较高,不能承受较大的冲击和振动,无法适应油污、淋雨和灰尘较多的工作环境;磁栅式传感器结构简单,同时具有一定抗干扰能力,但是对磁栅尺与磁头的装配间隙精度要求较高,无法适应动子高速运动时的横向振动偏摆,同时存在磁头容易退磁的问题,使用寿命较低。综合考量,以上位移测量技术均无法直接用于电磁发射工况下直线电机的位置检测,因此需要专门设计一套具有较强的环境适应性、较高的可靠性同时满足电磁发射工况要求的位置检测系统。
为此,提出了基于电感式接近开关的位置检测系统设计方案。电感式接近开关是利用高频探测线圈接近被测导体时产生的电涡流效应来控制开关的导通或关断的非接触式接近开关[14-16],具有较好的环境适应性和较高的可靠性,能够满足电磁发射特殊工况条件对于位置检测系统的苛刻要求。本文提出的位置检测方案以电感式接近开关作为位置传感器,根据电机初级分段拼接的特点,采用分段布设位置传感器的方式构成传感器阵列。当动子编码器经过传感器阵列的感应区域时,阵列输出相互正交的位置信号,最后通过正交编码算法对位置信号进行分析计算即可得到动子的实际位置。位置传感器作为系统中的关键部件,其输出特性需要满足电磁发射的工况要求,尤其能够适应动子高速运动时的横向振动偏摆[17-18]。因此,在确定位置检测系统原理和方案的基础上,对位置传感器的工作机理和性能进行深入的分析和考核是非常有必要的。
本文首先提出了适用于电磁发射特殊工况的位置检测系统方案和位置传感器阵列的拓扑结构,在此基础上,深入分析了位置传感器的工作机理和性能指标,并在实际电磁发射平台上进行了实验测试。实验结果验证了本文工作的可行性和有效性。
1 位置检测系统方案
1.1 基本原理
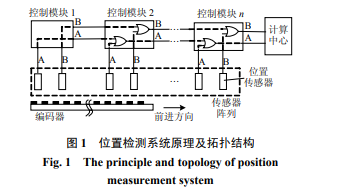
位置检测系统的方案原理及拓扑结构如图 1 所示。系统主要由编码器、位置传感器阵列、控制模块以及计算中心组成。编码器安装于动子上,由非金属基体和一定数量的金属齿片组成(以下简称编码齿)。编码齿沿编码器长度方向(即动子运动方向) 等间距分布于非金属基体上。当编码器随动子运动时,位置传感器在编码齿的感应下周期性的关断,进而输出连续的方波信号。每段电机安装 2 个位置传感器,分别定义为传感器 A 和 B,因此在整个系统中构成了 2 × n 的传感器阵列,其中 n 为直线电机的总段数。通过合理设计编码器结构以及调整传感器间距可以使两路位置方波信号相位差为 90°,这样 A、B 输出的两路信号具有正交关系。不同段位的 A、B 两路信号分别通过控制器进行“或”运算得到系统最终输出的位置信号。计算中心根据位置信号利用正交编码算法计算出动子的运动位置。
1.2 系统参数设计
位置传感器阵列参数与编码器的结构参数之间需要满足一定关系,必需慎重设计。
如图 2 所示,编码器总长度为 L0,编码齿宽度为 w,齿间距为 l。传感器 Ak、Bk位于同一段电机, Ak+1 位于相邻段。L1 为同段两个传感器的中心线距离,L2 为相邻段位同编号传感器的中心线距离,同时也是一段直线电机初级的长度。d 为传感器到编码器的探测距离,x 为传感器的径向探测范围。为实现系统功能,系统参数设计应满足如下条件:
综合上述分析,位置检测系统的可行性以及实际性能主要由系统的结构参数和传感器的性能共同决定。在结构参数确定的情况下,传感器的探测性能是决定整个检测系统成功与否的关键环节。因此,为设计出满足电磁发射要求的位置检测系统,需要在合理设计整个系统的拓扑结构和关键参数的基础上,进一步对位置传感器本身的工作机理和探测性能进行详细深入的分析和研究。
2 位置传感器工作机理研究
2.1 基本原理
位置传感器的基本工作原理如图 3 所示。传感器共有 4 个线圈,分别定义为发射线圈 (T1)、接收线圈(S1)、发射补偿线圈(T2)和接收补偿线圈(S2)。T1 和 S1、T2 和 S2 分别构成 2 组互感线圈。同时,T1、T2 串接构成发射支路,S1、S2 反向串接构成接收支路。当向 T1、T2 所在的发射支路加以交变激励源 Ue 时,T1、T2 分别在 S1、S2 中激发感应电压,S1、S2 通过反向串接输出差动电压 Ud。Ud 经过选频放大电路后又输出 Ue作为 T1、 T2 的激励源,这样 4 个线圈以及选频放大电路共同构成了一个具有正反馈回路的感应振荡器。当没有外部金属接近时,可以通过合理设计电路参数使得振荡器回路处于停振的临界平衡状态。当有金属靠近时,T1、S1 的等效阻抗发生改变,平衡态被打破,此时振荡器回路满足振荡条件。以噪声信号作为起振源,在正反馈回路的放大作用下,振荡器迅速起振。输出的振荡信号经过整流、滤波以及迟滞比较环节后,转变为开关信号作为传感器的最终输出。
传感器的基本结构如图 4 所示。传感器由 2 个垂直拼接的 PCB 板组成。其中 PCB1 位于传感器的感应端,T1、S1 位于 PCB1 的两面,用来感应被测导体的电涡流效应;T2、S2 以及后续处理电路位于 PCB2。由于 T2、S2 与 T1、S1 垂直布置,因此两组互感线圈不会相互影响,同时 T2、S2 也不会受到被测导体涡流场的影响。
2.2 感应振荡器的数学模型
感应振荡器是传感器的核心环节,当被测导体接近传感器的探测线圈时,参照图 3,建立发射支路、接收支路以及被测导体的等效电路如图 5 所示。
图 5 中,左侧回路为被测导体中电涡流环等效电路,右侧上下两个回路分别为传感器的发射支路和接收支路,其中 Ue 为发射支路的输入电压,Ud 为接收支路在互感作用下输出的差动电压。
3 实验验证
基于上述分析,进行了传感器的性能试验测试和发射平台上的位置检测系统实验测试。实际位置传感器的关键参数以及位置系统的关键参数如表 1 所示。
3.1 传感器性能测试
单个编码齿通过传感器感应端时,传感器的输出信号以及传感器内部振荡器的振荡信号波形如图 8 所示。从图 8 可以看出,编码齿进入传感器探测范围时,感应振荡器迅速起振,同时传感器输出开关信号。当编码齿离开传感器的探测范围时,振荡器停振,同时传感器输出信号恢复到原始状态。
按照实际工况条件(参见图 6(b)),利用单个编码齿对传感器的探测范围边界进行测定,结果如图 9 所示。
从图 9 可以看出,传感器的最远探测距离为 8.5 mm。当探测距离为设计值 4 mm 时,径向探测范围为 14.6 mm,根据式(4),信号占空比为 48.7%。
已知电机动子的偏摆幅度最大值为 ±2 mm,即探测距离变化范围为 2~6 mm。根据图 9,对应径向探测范围 18.4~11.0 mm,信号占空比变化范围为 61.3%~36.7%,满足式(4)要求。因此该接近开关适用于位置检测系统。
对传感器的进行了动态性能测试。利用高速旋转平台模拟编码器的运动,探测距离固定为 4 mm,测得传感器输出的信号频率及占空比如表 2 所示。
从表 2 可以看出,在编码器运动速度< 105 m/s、开关频率< 3.5 kHz 的范围内,传感器均能输出正常信号。信号占空比在 50%上下轻微浮动,满足系统要求。
3.2 位置检测系统测试
利用上述传感器,基于本文提出的位置检测系统网络拓扑以及参数设计方法,研制了实际位置检测系统。根据前面的分析和实际装置的测试,系统的检测精度为 7.5 mm,系统探测的最大速度 > 105 m/s。该系统在实际发射实验平台上进行了大量的实验测试,均能够正常运行且满足性能要求。图 10、11 为某次发射测试的实验波形。图 10 为 Synergy 数据采集系统采集到的两路位置脉冲信号波形,从图 10 可以看出,两路位置信号具有良好的正交关系;图 11 为动子给定位置与实测位置对比波形,可以看出该系统能够实时准确的计算出动子位置并反映出动子的运动轨迹,实现了直线电机精准的闭环控制,验证了位置检测系统工作性能。
4 结论
本文提出了适用于电磁发射特殊应用工况的直线电机位置检测系统。设计了位置检测系统的拓扑结构,提出了系统中传感器阵列拓扑与编码器的参数设计方法。深入研究了位置传感器的工作机理,推导了传感器参数与性能的数学模型,并根据实际系统对传感器的性能要求,分析了传感器需具备的参数条件。在此基础上研制了实际的位置检测装置,并在发射平台上进行了的实验验证。实验结果表明,所设计研制的位置检测装置可以较好的实现电磁发射特殊工况下动子位置的准确、迅速、可靠的测量,具有较高的理论和工程价值。——论文作者:王擎宇,何娜,芮万智
参考文献
[1] Bushway R R.Electromagnetic aircraft launch system development considerations[J]. IEEE Transactions on Magnetics,2001,37(1):52-54.
[2] Fair H D . The science and technology of electric launch[J].IEEE Transactions on Magnetics,2001,37(1): 25-32.
[3] Doyle M R,Samuel D J,Conway T,et al.Electromagnetic aircraft launch system-EMALS[J].IEEE Transactions on Magnetics,1995,31(1):528-533.
[4] 鲁军勇,马伟明,许金.高速长定子直线感应电动机的建模与仿真[J].中国电机工学报,2008,28(27):89-94. Lu Junyong,Ma Weiming,Xu Jin.Modeling and simulation of high speed long primary double-sided linear induction motor[J].Proceedings of the CSEE,2008, 28(27):89-94(in Chinese).
[5] 鲁军勇,马伟明,孙兆龙,等.多段初级直线感应电机静态纵向边端效应研究[J].中国电机工学报,2009, 29(33):95-101. Lu Junyong,Ma Weiming,Sun Zhaolong,et al.Research on static longitudinal end effect of linear induction motor with multi-segment primary[J].Proceedings of the CSEE, 2009,29(33):95-101(in Chinese).
[6] 孙兆龙,马伟明,鲁军勇,等.长初级双边直线感应电动机静态纵向边端效应及阻抗矩阵研究[J].中国电机工学报,2010,30(18):72-77. Sun Zhaolong,Ma Weiming,Lu Junyong,et al.Research of static longitudinal end effect and impedance matrix for long primary double-sided linear induction motors[J]. Proceedings of the CSEE , 2010 , 30(18) : 72-77(in Chinese).
[7] 许金,马伟明,鲁军勇,等.分段供电直线感应电机气隙磁场分布和互感不对称分析[J].中国电机工程学报, 2011,31(15):61-68. Xu Jin,Ma Weiming,Lu Junyong,et al.Analysis of air-gap magnetic field distribution and mutual inductance asymmetry of sectionally powered linear induction motor[J].Proceedings of the CSEE,2011,31(15): 61-68(in Chinese).
[8] 马明中,马伟明,张育兴,等.多定子直线感应电机故障模式下的电流过载特性[J].中国电机工程学报,2013, 33(18):96-102. Ma Mingzhong,Ma Weiming,Zhang Yuxing,et al.Phase current overload characteristics of multi-primary linear induction motors under failure modes[J].Proceedings of the CSEE,2013,33(18):96-102(in Chinese).
[9] 张志华,史黎明,蔡华,等.长初级双边直线感应电机制动特性研究[J].中国电机工程学报.2015,35(11): 2854–2861. Zhang Zhihua,Shi Liming,Cai Hua,Li Yaohua,et al. Research on braking characteristics of long primary double-sided linear induction motor[J].Proceedings of the CSEE,2015,35(11):2854-2861(in Chinese).
转载请注明来自:http://www.lunwencheng.com/lunwen/dzi/21759.html
